Module - Utils
This module is the lowest level of abstraction and contains many base functions for interacting with the robot and instruments. It should not need to be edited very often. Files include:
base_utils: basic utility functionskinova_gripper: functions adapted from official Kortex API to operate the robot gripperkinova_move: functions adapted from official Kortex API to move the robot to snapshotskinova_utils: basic utility functions adapted from official Kortex APImongo_dbs: base functions and classes for interacting with MongoDB databasespotentiostat_hp: example functions for using hardpotato software for interacting with CHI potentiostatspotentiostat_kbio: (no longer used!) base functions and classes for interacting with kbio potentiostatsprocessing_utils: functions for processing
Note about Robotic Motion
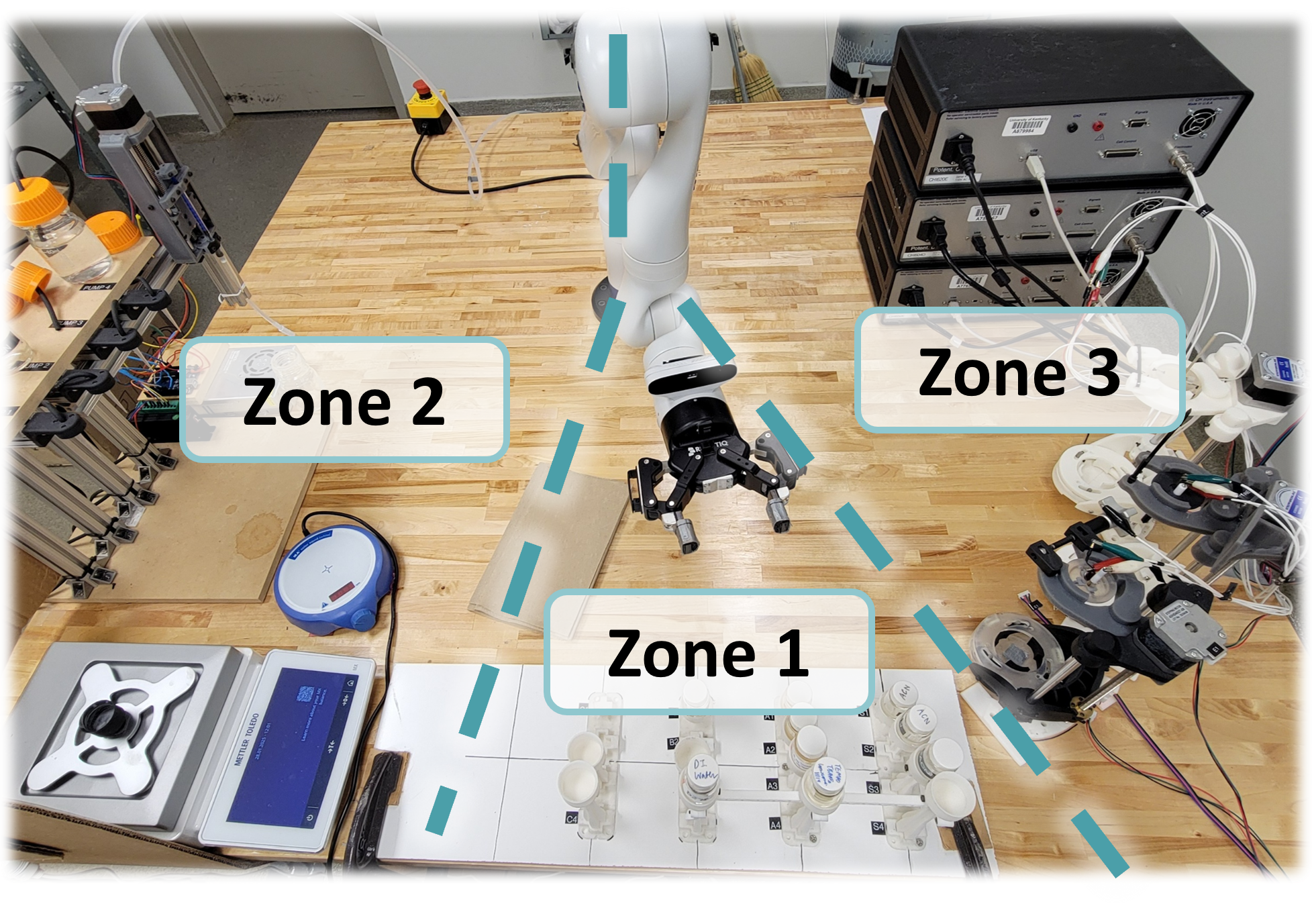
The robotic workspace is divide into zones. When directing movement about the workspace, the Robot API considers current
and target zones. In general, when moving to a station, the robot arm is directed to move to the pre_ snapshot, then
to the station snapshot (including a rise_amount where necessary). However, if the robot arm’s existing zone is
different from its target zone, the arm will move to the exiting zone home position, then the target zone home position.
Only then will it start the process of moving to the station. This process minimized the risk of the robot arm colliding
with workspace hardware.